欢迎来到noYes游戏王国
网站导航
在上一篇文章中,小编为您详细介绍了关于《北斗加速定位成国产安卓手机“出厂标配”,用户数突破5亿》相关知识。本篇中小编将再为您讲解标题焊接机器人技术之焊缝跟踪功能简介。
原标题:焊接机器人技术之焊缝跟踪功能简介
机器人替代人工焊已经越来越普遍了,不仅效率高,品质好,易于管理也是企业选择的一个原因。但单纯的焊接机器人系统对产品的精度要求及工装的装配要求都挺高,一些精度不高的产品靠焊接机器人就解决不了工厂实际需求,这就需增加焊缝跟踪系统了。
焊接机器人焊缝跟踪分电弧跟踪和激光跟踪两种
电弧跟踪一般都用于厚板,多是些摆焊。像挖机斗臂,行车焊接等。通过焊丝接触母材两个面来计算出焊缝与编程时发生的偏移量,再回头通过摆焊来进行焊接。电弧跟踪一般都需要配合焊接机器人始端检出功能才能使用。可以先检测焊缝再焊接,也可以边检测边焊接。焊接机器人的始端检出可以单独使用,只检测起点与终点的偏移位置。
而电弧跟踪是任何位置都可以检测,如果是一条直角焊缝,基本用始端检出功能就可以了(焊接变形过大效果也不理想)。2MM以下的薄板,尤其是拼接焊缝,大多数采用激光作为焊缝跟踪来进行焊接,激光跟踪是通过前端的摄像头监控激光扫描得出焊缝信息反馈给机器人控制器,机器人在焊接过程中会根据得出的数据来自动修改轨迹完成焊接。
电弧跟踪和始端检出是焊丝触碰母材两个面,焊丝前段释放低电压,通过传感器将信息传递给控制器,然后在经过计算,自动获得焊缝所在位置。当工件位置产生变化时,无需重新编程,通过电弧追踪,仍然可以获得焊缝位置。所以电弧跟踪和始端检出只适合于角焊缝,或搭接焊缝(板厚要大于3mm)。
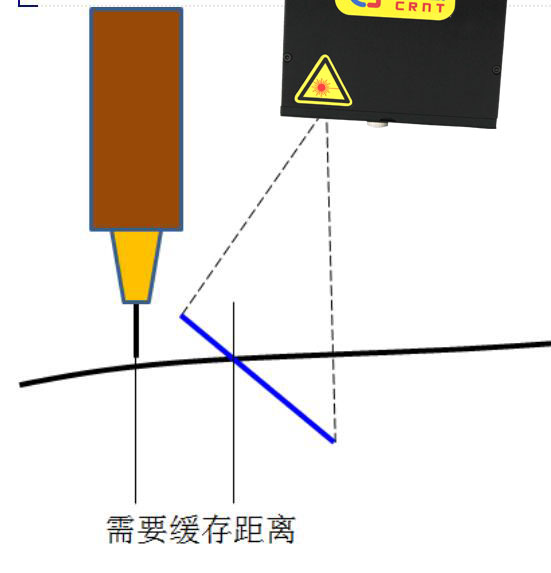
而激光跟踪精度相对电弧跟踪略高一点,当激光条纹照射到焊缝表面,形成激光条纹(激光结构光),经过传感器上的透镜在光敏探测器上产生一个焊缝截面的轮廓,即反映焊缝截面形状的激光条纹图像。激光条纹图像在视觉控制中进行处理,提取焊缝的特征数据,如跟踪点的坐标、焊缝间隙、错边和截面积等。视觉系统根据测量到的焊缝位置信息计算焊枪的路径,并将路径数据传输给机器人,机器人实时控制运行轨迹保证焊枪始终对准焊缝。同时视觉系统还可以根据所测的焊缝尺寸数据 ,计算所需要的焊接参数,如焊接速度、电弧电压、焊接电流、摆动幅度等,这些焊接参数可以经以太网传送给机器人,经由机器人控制焊接速度和焊枪摆动,或者控制焊机电源调整焊接参数,从而实现自适应的焊接参数控制。

创想激光焊缝跟踪系统,可以改进机器人焊接应用,解决焊接过程中工件组对和工装定位造成的高低左右偏差。 游戏网
编后语:关于《焊接机器人技术之焊缝跟踪功能简介》关于知识就介绍到这里,希望本站内容能让您有所收获,如有疑问可跟帖留言,值班小编第一时间回复。 下一篇内容是有关《怎么做一个B2B供应链后台管理系统?》,感兴趣的同学可以点击进去看看。




























































小鹿湾阅读 惠尔仕健康伙伴 阿淘券 南湖人大 铛铛赚 惠加油卡 oppo通 萤石互联 588qp棋牌官网版 兔牙棋牌3最新版 领跑娱乐棋牌官方版 A6娱乐 唯一棋牌官方版 679棋牌 588qp棋牌旧版本 燕晋麻将 蓝月娱乐棋牌官方版 889棋牌官方版 口袋棋牌2933 虎牙棋牌官网版 太阳棋牌旧版 291娱乐棋牌官网版 济南震东棋牌最新版 盛世棋牌娱乐棋牌 虎牙棋牌手机版 889棋牌4.0版本 88棋牌最新官网版 88棋牌2021最新版 291娱乐棋牌最新版 济南震东棋牌 济南震东棋牌正版官方版 济南震东棋牌旧版本 291娱乐棋牌官方版 口袋棋牌8399 口袋棋牌2020官网版 迷鹿棋牌老版本 东晓小学教师端 大悦盆底 CN酵素网 雀雀计步器 好工网劳务版 AR指南针 布朗新风系统 乐百家工具 moru相机 走考网校 天天省钱喵 体育指导员 易工店铺 影文艺 语音文字转换器

