欢迎来到noYes游戏王国
网站导航
在上一篇文章中,小编为您详细介绍了关于《[路演]*ST天润:公司储备的几款知名IP产品有望在2020年上线》相关知识。本篇中小编将再为您讲解标题仿生学又立功 未来机器人将受益于这种技术。
原标题:仿生学又立功 未来机器人将受益于这种技术
【环球网智能报道 记者 张阳】如今的机器人一般有两种形态,一种是大家最为熟悉的硬体机器人,比如波士顿动力的机器人或者是工业产线上的工业机器人;还有一种就是软体机器人,一般倾向于模仿有机生物体,更容易适应环境,与人类共同工作更加安全。但是最近,北卡罗来纳州立大学(North Carolina State University)开发了一种新型的脊柱机器人,它的移动速度比以往任何时候都快。这都要归功于世界上最快的陆地动物:猎豹。

猎豹是目前地球上已知奔跑速度最快的动物,冲刺的平均时速为58英里,这主要是由于它们独特的生理结构,灵活的脊柱使得它们在快速奔跑时可以拱起背部,形成更长的步幅和更快的步频。
北卡罗来纳州立大学机械与航空航天工程助理教授尹洁(音)博士基于此开发了LEAP脊柱,模仿了猎豹的柔韧性,通常情况下软体机器人在固体表面移动,受限于四肢需要踩在地面上,速度仅能达到身体长度的0.8,然后这款7毫米长、45克重的概念原型,每秒能跑2.7倍的身长距离,超过体长的3倍,即使在斜面上也能完全克服,甚至可以被用于水下推动机器鱼,这比其他软体机器人和混合型机器人的速度快32%到122%。
尹洁(音)博士表示这种柔性机器人速度快因为它的脊柱是“双稳态”的,这意味着,它的脊柱更像是开关,能从一个位置到另一个位置,而不是像门的铰链的运转方式。
“我们可以通过将空气抽到这个柔软的硅胶机器人管道之中,让它在稳定状态之间快速切换,在两种状态的转换过程中可以释放出大量能量,推动机器人快速移动。”
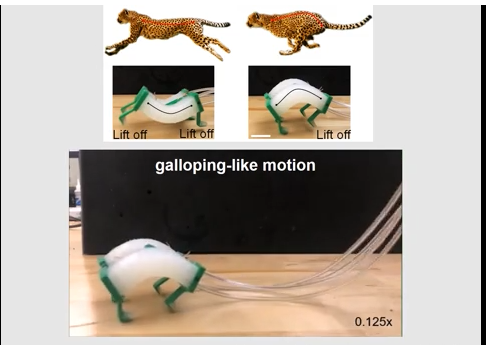
如同视频所示,当这个机器人的前脚着地时,后脚离开地面,背部拱起,如此往复步幅大大延长,这意味着它能使用更少的能量覆盖更长的距离。这个原型的演示让人印象深刻,尹洁(音)博士表示,希望能够构建更大或者更小的实用机器人,“它可以放大的动物的尺寸,甚至是人体的尺寸,也可以缩小到微型机器人甚至纳米机器人的大小。”
在未来的应用前景上,LEAP技术可以有望做出更加逼真的假手,洁(音)博士表示即使是刚性机器人也可以从这种系统中受益。他还透露,团队希望开发出具有更多稳定性的模块,而不是目前原型演示的二元稳定状态,这就会允许机器人做出更加复杂的动作,甚至从现在的气体驱动改进为磁性驱动,但是这种的技术的大规模应用可能还需要比较漫长的时间。游戏网
编后语:关于《仿生学又立功 未来机器人将受益于这种技术》关于知识就介绍到这里,希望本站内容能让您有所收获,如有疑问可跟帖留言,值班小编第一时间回复。 下一篇内容是有关《[路演]恒久科技:目前公司未参与央行在苏州地区试点的数字货币业务》,感兴趣的同学可以点击进去看看。




























































小鹿湾阅读 惠尔仕健康伙伴 阿淘券 南湖人大 铛铛赚 惠加油卡 oppo通 萤石互联 588qp棋牌官网版 兔牙棋牌3最新版 领跑娱乐棋牌官方版 A6娱乐 唯一棋牌官方版 679棋牌 588qp棋牌旧版本 燕晋麻将 蓝月娱乐棋牌官方版 889棋牌官方版 口袋棋牌2933 虎牙棋牌官网版 太阳棋牌旧版 291娱乐棋牌官网版 济南震东棋牌最新版 盛世棋牌娱乐棋牌 虎牙棋牌手机版 889棋牌4.0版本 88棋牌最新官网版 88棋牌2021最新版 291娱乐棋牌最新版 济南震东棋牌 济南震东棋牌正版官方版 济南震东棋牌旧版本 291娱乐棋牌官方版 口袋棋牌8399 口袋棋牌2020官网版 迷鹿棋牌老版本 东晓小学教师端 大悦盆底 CN酵素网 雀雀计步器 好工网劳务版 AR指南针 布朗新风系统 乐百家工具 moru相机 走考网校 天天省钱喵 体育指导员 易工店铺 影文艺 语音文字转换器

