欢迎来到noYes游戏王国
网站导航
在上一篇文章中,小编为您详细介绍了关于《被央视3·15点名“广告藏猫腻”,趣头条回应:全平台彻查》相关知识。本篇中小编将再为您讲解标题MIT开发出带触觉柔性机械手,能灵活操作电线等可变形物体。
原标题:MIT开发出带触觉柔性机械手,能灵活操作电线等可变形物体
7月14日,麻省理工学院在机器人领域国际顶级会议RSS2020上展示了一对搭载高分辨率触觉传感器的机械手,它们能够灵活操作电缆、电线等可变形物体。研究团队称,这是机器人首次在没有其他机械帮助的情况下实时操作电缆。
论文第一作者麻省理工学院博士后佘宇在接受澎湃新闻(www.thepaper.cn)记者采访时介绍,该机械手可以应用于任何涉及绳索操作的场景,比如工厂里的缆绳、电缆自动加工和装配。
“潜在的应用包括任何含有可变形物体的操作,比如铺床单,穿衣服,叠衣服。”
他透露,下一步研究团队会进行更复杂绳索的自动化操作,也会开展对更复杂的可变形物体的自动化操作,比如衣服和床单。
这项研究由麻省理工学院的计算机科学和人工智能实验室(CSAIL)与机械工程系合作完成。
双“手”配合插耳机线
对于机器人来说,实时操作诸如电缆、金属丝之类的可变形柔性物体是困难的。因为这些柔性物体的形状会随着滑动而发生动态变化。而机器人的“手指”必须不断感应并调整物体的位置和运动。
通常,机器人操作电缆需要在有机械约束的条件下进行,即通过把绳子放置在桌上等方式,形成准静态结构,降低电缆的自由度后,机器人再进行操作。
而佘宇所在团队的目标是在没有机械约束的条件下实时操作电缆。
他们在公开视频中演示了这对机械手插耳机线的过程:“左手”轻轻夹住耳机线的尾部,“右手”夹住耳机线一侧并进行滑动,在感知到插孔时停止并调整姿势,让耳机线插头对准孔位。此时“左手”手指配合松开耳机线,“右手”随之将耳机插头插入插孔。
视频显示,面对操作过程中人为造成的外力干扰,机械手做出了及时调整。
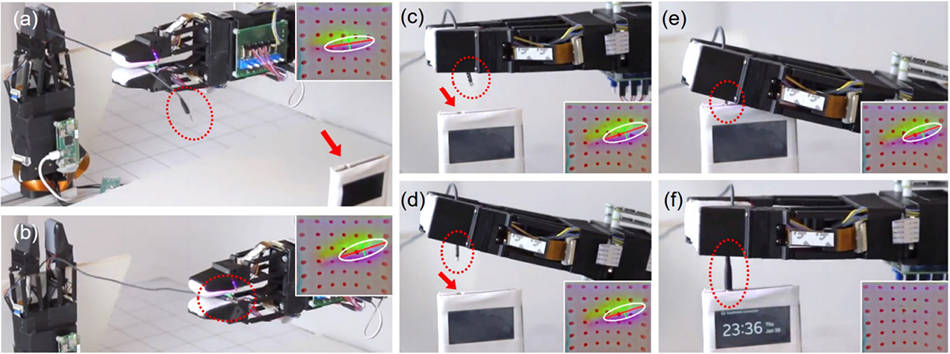
机械手将耳机插头插入插孔
佘宇介绍,研究团队结合了机械设计、触觉传感和控制器设计三个领域来开发这款机械手。而最大的亮点在于,其中每一个具体研究方向都不是特别复杂,“但是他们结合在一起能够解决非常复杂的问题”。
隐藏在“指尖”的触觉传感器
在佘宇看来,如何有机地融合机械设计、触觉传感和控制器设计这三个相对独立的领域系统也是整个设计过程中最困难的。因此,团队在设计的每一步过程中都不断结合、考虑三个领域。比如,在最初进行机械设计的时,他们就会考虑后续的传感和控制设计问题。
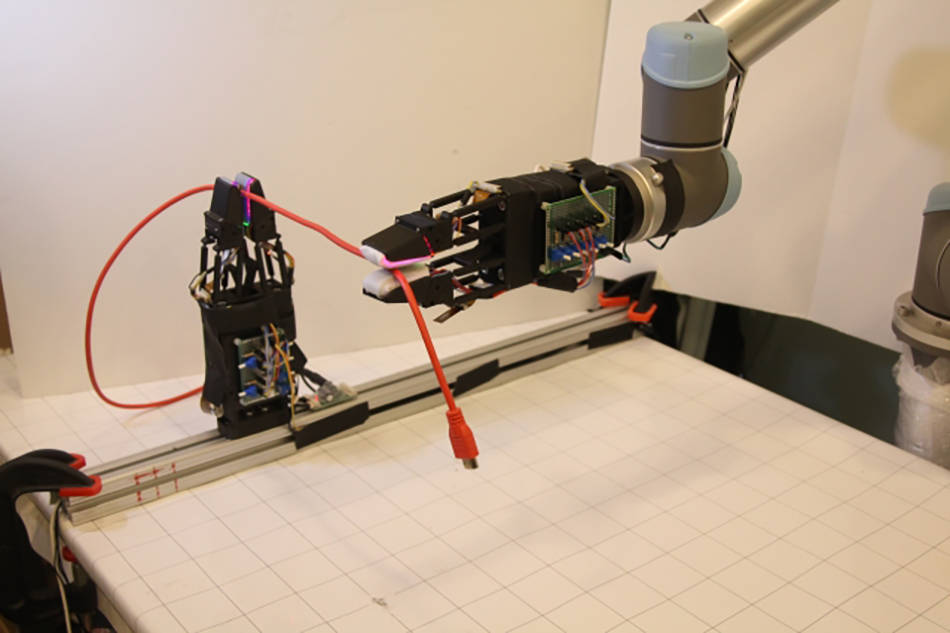
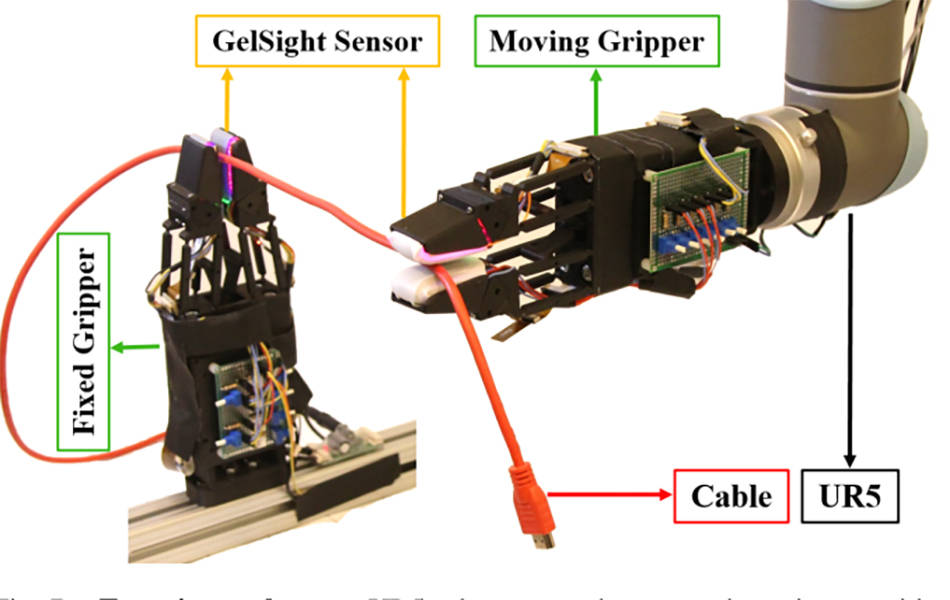
在机械设计方面,该款机械手主要由一对夹具状的两指抓爪和机械臂组成。两只具有力和位置控制功能的抓爪位置相对,并能够迅速移动。这对抓爪被安装在机械臂上,机械臂也能够移动。
机械手系统
实现机械手实时跟踪并操作电缆需要满足多种条件。首先,机械手需控制抓握力以实现电缆在抓爪中平稳滑动;其次,机械手需要控制其“抓握姿势”以防止电缆从抓爪的“指间”掉落。研究团队通过触觉传感和控制器设计来解决这些问题。
佘宇介绍,传统触觉传感器的反馈信息非常有限,很难获取接触物体的姿态信息。因此,研究团队在抓爪的“指尖”安装了内置摄像头的“Gelsight”触觉传感器。这种内置摄像头的触觉传感器在工作过程中提供了“非常高维”的反馈信号,包括接触物体的位置和姿态信息。
他表示,虽然最近也有一些机械手使用了基于相机的触觉传感器,“但是他们的控制带宽非常低,做不到实时控制”,而MIT这款机械手是专门定制的,能够有效做到实时反馈。
根据传感器的信息,研究团队设计了同时运作的两个控制器,使机械手能够灵巧操作可变形的物体。一个为电缆夹具控制器,用于调节抓力,使电缆能够在抓爪中平稳滑动。另一控制器为电缆姿势控制器,该控制器能够保持电缆居于抓爪“手指”的中央。

机械手操作电缆
基于触觉传感与控制器设计,当抓爪被安装在机械臂上时,能够从最初随机抓握的位置开始,像人类一样用“双手”移动电缆,找到电缆的末端。该感知和控制系统还能够应用于控制其他不同材料、不同刚度和直径的电缆,也适用于不同的电缆跟踪与操作速度。
未来想尝试电缆布线
佘宇介绍,这款机械手可以应用于任何含有绳索操作的场景,比如工厂里的缆绳或电缆的自动加工和装配。潜在的应用包括含有任何可变形物体的操作,比如铺床单、穿衣服、叠衣服等。
他表示,操作可变形物体如电缆、布料等在我们的日常生活中非常普遍,团队希望机器人能帮助人类完成这类工作,尤其是在工作内容重复乏味或不安全的情况下。
目前,这款机械手还没有投入实际使用,佘宇说,如果有合适的机会,团队希望能够和企业合作推广这款机械手。
研究团队指出,这款机械手还有改进空间。他们希望能够进一步改善传感器的形状以提高整体性能。触觉信号的频率也有待进一步提高。
此外,目前机械手的尺寸还没有达到理想状态,佘宇和他的团队计划进一步缩小机械手的尺寸来执行更加灵活的任务。
未来,研究团队计划对更复杂的绳索自动化操作进行研究,例如电缆布线和通过障碍物插入电缆等,也会探索更复杂的可变形物体的自动化操作。
(本文来自澎湃新闻,更多原创资讯请下载“澎湃新闻”APP)游戏网
编后语:关于《MIT开发出带触觉柔性机械手,能灵活操作电线等可变形物体》关于知识就介绍到这里,希望本站内容能让您有所收获,如有疑问可跟帖留言,值班小编第一时间回复。 下一篇内容是有关《低调获小贷牌照?赶晚集的字节跳动或意在电商金融》,感兴趣的同学可以点击进去看看。




























































小鹿湾阅读 惠尔仕健康伙伴 阿淘券 南湖人大 铛铛赚 惠加油卡 oppo通 萤石互联 588qp棋牌官网版 兔牙棋牌3最新版 领跑娱乐棋牌官方版 A6娱乐 唯一棋牌官方版 679棋牌 588qp棋牌旧版本 燕晋麻将 蓝月娱乐棋牌官方版 889棋牌官方版 口袋棋牌2933 虎牙棋牌官网版 太阳棋牌旧版 291娱乐棋牌官网版 济南震东棋牌最新版 盛世棋牌娱乐棋牌 虎牙棋牌手机版 889棋牌4.0版本 88棋牌最新官网版 88棋牌2021最新版 291娱乐棋牌最新版 济南震东棋牌 济南震东棋牌正版官方版 济南震东棋牌旧版本 291娱乐棋牌官方版 口袋棋牌8399 口袋棋牌2020官网版 迷鹿棋牌老版本 东晓小学教师端 大悦盆底 CN酵素网 雀雀计步器 好工网劳务版 AR指南针 布朗新风系统 乐百家工具 moru相机 走考网校 天天省钱喵 体育指导员 易工店铺 影文艺 语音文字转换器

