欢迎来到noYes游戏王国
网站导航
在上一篇文章中,小编为您详细介绍了关于《脸书宣称“包容”又滋生仇恨750多家知名企业“翻脸”?》相关知识。本篇中小编将再为您讲解标题机器人激光焊缝跟踪应用于铁塔焊接。
原标题:机器人激光焊缝跟踪应用于铁塔焊接
输电线路铁塔的塔脚为整个输电线路铁塔结构的支撑部件,其结构的稳定性直接决定了输电线路铁塔的结构稳定性和使用寿命。输电线路铁塔塔脚为焊接组合件,现有技术中对于塔脚的生产大多采用手工电弧焊和CO2气体保护焊的方式,由于焊接人员的焊接水平、焊接经验的影响以及由于采用人工的焊接方法,导致塔脚的产量无法保证。因此,如何保证输电线路铁塔的塔脚焊接质量,并提高输电线路铁塔的塔脚的生产效率,是目前本领域技术人员亟待解决的问题。机器人激光焊缝跟踪应用于铁塔焊接,不仅能解决上述问题,而且可以提高行业的自动化焊接水平。

铁塔塔脚基本是由钢板焊接而成的结构件,工件在上下料、组对的时候难免会存在一定的误差,导致焊缝的位置和宽窄的一致性程度不高;且由于在焊接的过程中会产生一定的变形,使得先焊接的焊缝产生变形作用在所焊接的工件上,导致后焊的焊缝偏离了原来组对时的位置。
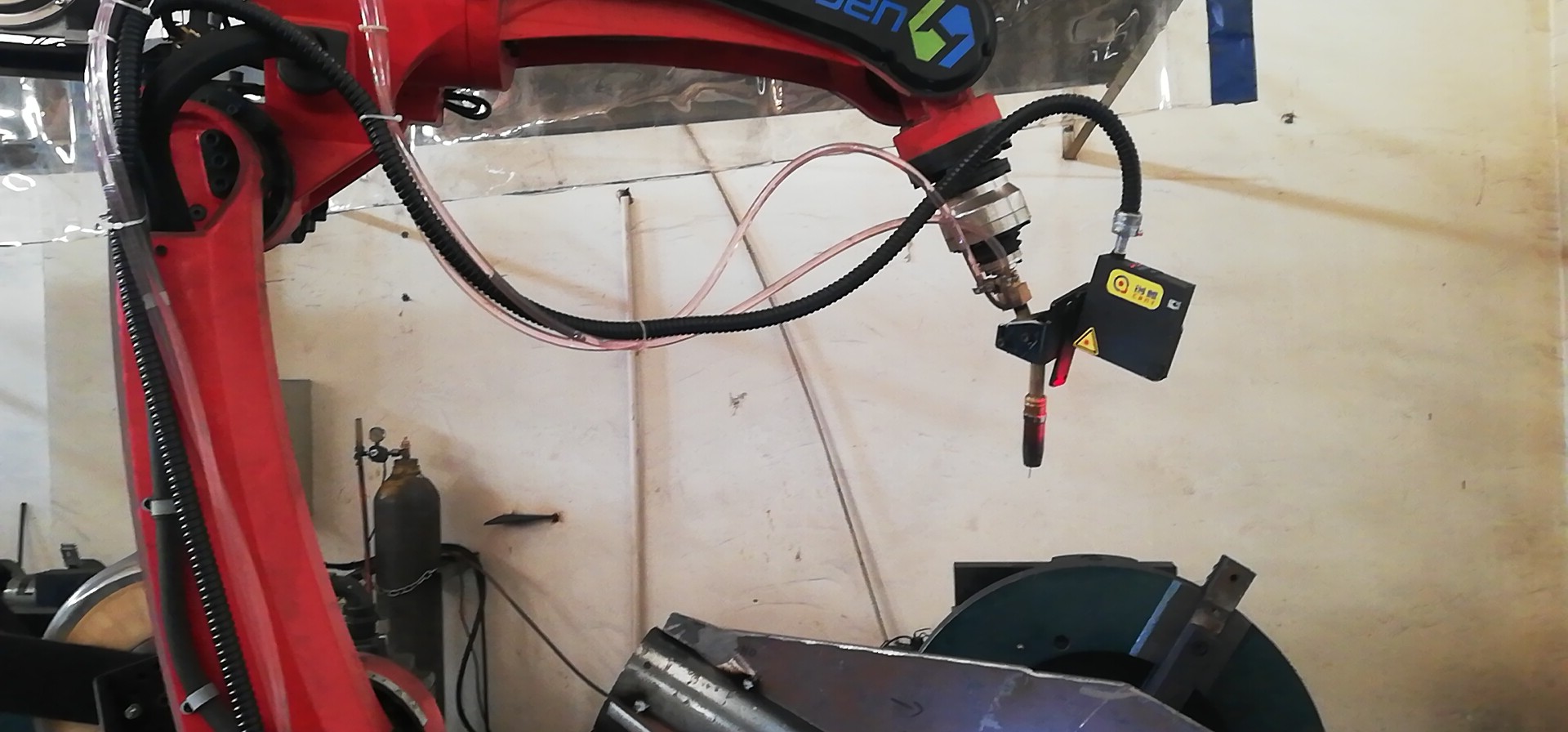
为了保证焊接的质量,要求机器人能够在焊接时能够自动找正焊缝的起始位置与正确方向,机器人激光焊缝跟踪系统可以实现焊接起始点的寻位以及焊缝跟踪功能。

机器人激光焊缝跟踪的焊缝起始点寻位方式主要是非接触传感器寻位,它利用激光三角测量原理,能够感知实际的工件位置,通过程序计算出实际位置与示教编程时工件表面位置的偏差,而后将偏差加入到示教时的焊接位置,来找到并修正正确焊接位置,以纠正装夹、组对以及焊接时所产生的焊接位置的偏差,从而来保证焊接的质量。
自适应宽度跟踪功能,原理是焊接机器人在焊接前检测整条焊缝上多个点,通过软件计算出焊缝坡口的宽度,来得到整条焊缝坡口宽度的变化情况。通过在焊接的过程中调整机器人的焊接摆动幅度与焊接速度进行轨迹的修正,即在焊缝较宽位置增大焊接摆幅,同时降低焊接速度,在焊缝较窄地方适当的减少摆幅,且相应地提高焊接速度,来得到焊高一致的焊缝,保证焊接轨迹始终位于坡口或焊缝的中心,从而达到提高焊接质量目的。
编后语:关于《机器人激光焊缝跟踪应用于铁塔焊接》关于知识就介绍到这里,希望本站内容能让您有所收获,如有疑问可跟帖留言,值班小编第一时间回复。 下一篇内容是有关《上海新一代人工智能计算与赋能平台重点项目在临港新片区启动》,感兴趣的同学可以点击进去看看。




























































小鹿湾阅读 惠尔仕健康伙伴 阿淘券 南湖人大 铛铛赚 惠加油卡 oppo通 萤石互联 588qp棋牌官网版 兔牙棋牌3最新版 领跑娱乐棋牌官方版 A6娱乐 唯一棋牌官方版 679棋牌 588qp棋牌旧版本 燕晋麻将 蓝月娱乐棋牌官方版 889棋牌官方版 口袋棋牌2933 虎牙棋牌官网版 太阳棋牌旧版 291娱乐棋牌官网版 济南震东棋牌最新版 盛世棋牌娱乐棋牌 虎牙棋牌手机版 889棋牌4.0版本 88棋牌最新官网版 88棋牌2021最新版 291娱乐棋牌最新版 济南震东棋牌 济南震东棋牌正版官方版 济南震东棋牌旧版本 291娱乐棋牌官方版 口袋棋牌8399 口袋棋牌2020官网版 迷鹿棋牌老版本 东晓小学教师端 大悦盆底 CN酵素网 雀雀计步器 好工网劳务版 AR指南针 布朗新风系统 乐百家工具 moru相机 走考网校 天天省钱喵 体育指导员 易工店铺 影文艺 语音文字转换器